团队
推荐
模板社区
专题
登录
免费注册
首页
流程图
详情
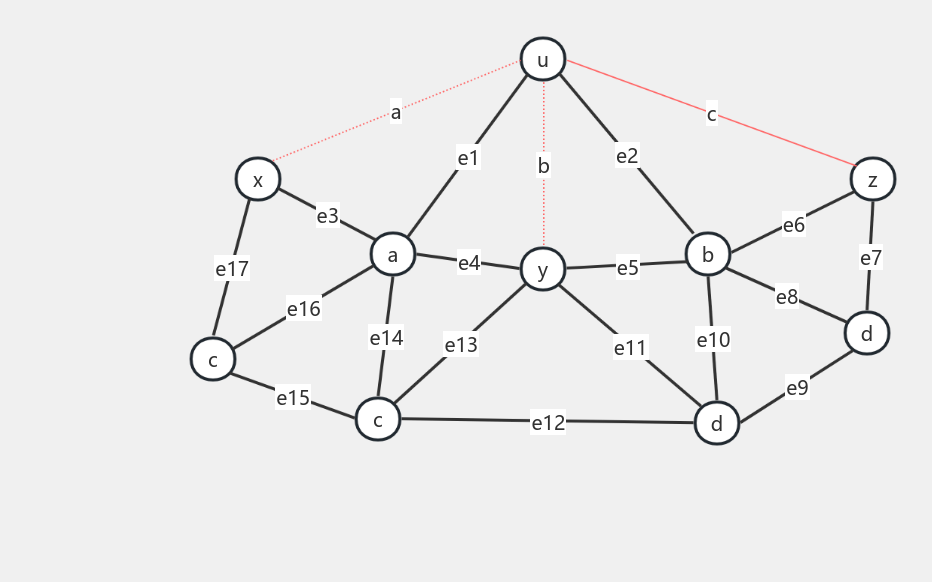
claw路径转换
2015-11-06 15:19:41
5
举报
分享方式
免费使用
为你推荐
查看更多
模型转换方法结构
路径
最大路径
论文研究路径
随机路径
路径管理
资金路径
毕业论文研究路径
玩家状态转换图
类型转换
Claw路径转换是一种在机器人运动规划中常用的方法,主要用于处理复杂环境中的路径问题。它通过将起始点和目标点之间的直线路径分割成一系列小的线段,然后将这些线段按照一定的规则进行组合,形成一条平滑且无碰撞的路径。这种方法可以有效地避免机器人在运动过程中与环境中的障碍物发生碰撞,提高机器人的运动效率和安全性。同时,Claw路径转换还具有计算简单、易于实现等优点,因此在实际应用中得到了广泛的应用。
作者其他创作
大纲/内容
c
y
d
e9
e2
e11
a
e15
e14
x
e4
e8
z
e7
e3
e11_b
b
e13
e11_a
e17
e5
e12
e6
e10
e16
u
e1
收藏
立即使用
NetDectArchiveFile
收藏
立即使用
kscan
收藏
立即使用
chrome
收藏
立即使用
doudizhu
狗o_o熊
职业:暂无
去主页
评论
0
条评论
回复
删除
取消
回复
下一页
狗o_o熊
职业:暂无
作者其他创作:
NetDectArchiveFile
254
2016-10-28
kscan
288
2016-09-23
chrome
651
2016-08-08
doudizhu
389
2016-08-03
为了保护您和被举报人的权利,请您慎重填写举报原因,我们会认真核实调查。
违法违禁:低俗、血腥、暴力等
模板文件问题:文件空白;内容错乱;克隆后无法编辑
模板内容涉及侵权
个人侵权
公司侵权
垃圾广告信息
其他理由
确定
图形选择
思维导图
主题
补充说明
AI生成
修改AI描述
去编辑
重新生成
提示
关闭后当前内容将不会保存,是否继续?
取消
确定